
Genesis - 물리 시뮬레이션 플랫폼 AI
Genesis : A Generative and Universal Physics Engine for Robotics and Beyond
제네시스는 물리 플랫폼으로 일반 목적의 로봇 공학, 실체 AI (Embodied AI), 물리 AI 응용 프로그램을 위해 설계되었습니다.
주요 기능:
물리 엔진: 광범위한 물질 및 물리 현상 시뮬레이션 가능
로봇 시뮬레이션 플랫폼: 경량, 초고속, Python 친화적
포토리얼리틱 렌더링: 강력하고 빠른 렌더링 시스템
생성 데이터 엔진: 자연어 설명을 다양한 데이터 형식으로 변환
Genesis의 목표
물리 시뮬레이션 접근성 향상
다양한 물리 솔버를 통합하여 현실 세계 재현
데이터 생성 자동화
주요 기능
속도: RTX 4090으로 초당 430만 프레임 이상 처리
다중 플랫폼 지원: Linux, macOS, Windows
다양한 물리 솔버 통합: Rigid Body, MPM, SPH, FEM 등
광범위한 소재 모델 지원: 고체, 액체, 기체, 변형 가능한 물체 등
로봇 호환성: 로봇 팔, 다리 로봇, 드론 등 다양한 로봇 지원
렌더링: 레이 트레이싱 기반 포토리얼리틱 렌더링 지원
미분 가능성: 일부 솔버에서 미분 가능, 추가 솔버도 향후 지원 예정
사용자 친화성: 직관적인 설치 및 API 제공
설명
VLM (Vision Language Model)을 기반으로 4D(3D 공간에 시간 축을 포함) 세계를 생성하고, 이 세계에서 다양한 모달리티(예: 비디오, 객체 이동 데이터, 텍스트 설명 등)의 데이터를 생성할 수 있습니다.
예시

손오공이 달려가서 봉을 내리치는 일관적인 움직임을 생성할 수 있다. 3D에서 시간을 더해 시뮬레이션을 할 수 있는 물리 엔진이기 때문이다.
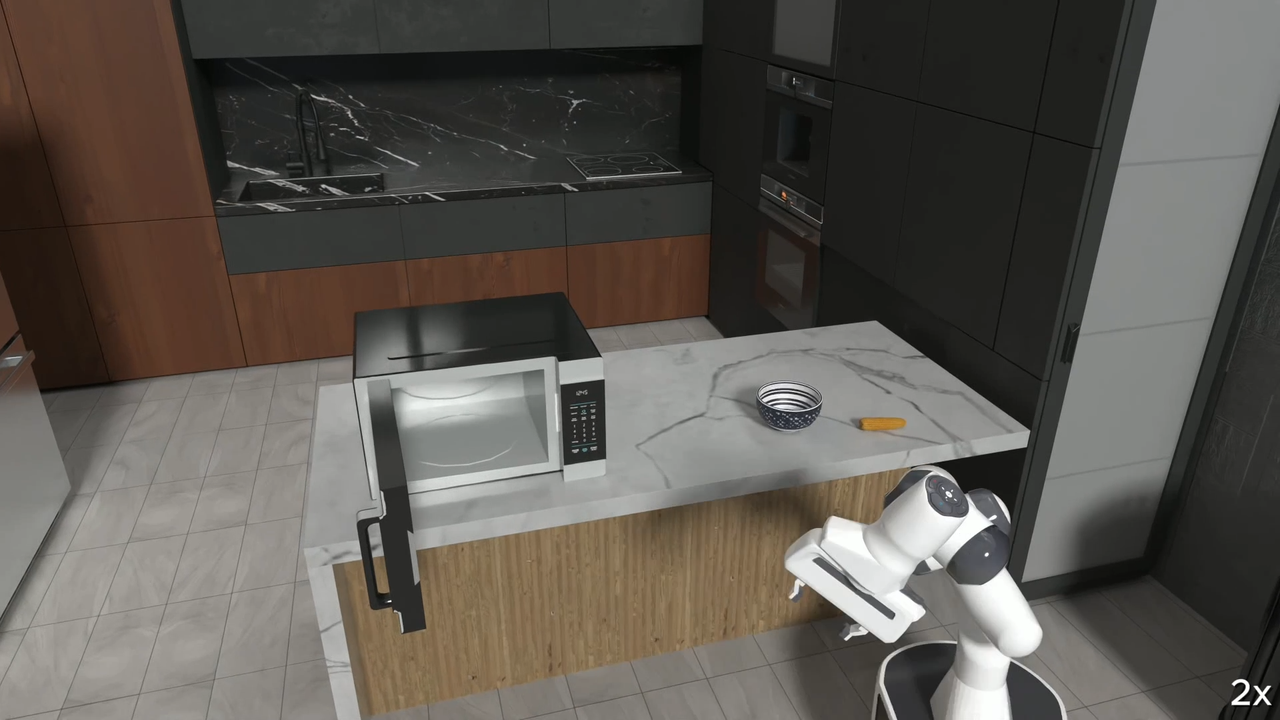
로봇을 가상 시뮬레이션 환경에서 훈련시키는데도 활용할 수 있다. (RoboGen 모듈 활용)
생성형 데이터 모달리티
물리적으로 정확하고 공간적으로 일관된 비디오.
카메라 움직임 및 파라미터.
인간 및 동물 캐릭터 모션.
로봇 조작 및 이동 정책 (실제 환경에 적용 가능).
상호작용 가능한 3D 장면.
개방형 세계의 관절 객체 생성.
음성 오디오, 얼굴 애니메이션 및 감정.
사용
파이 토치 또는 도커를 통해 사용 가능.
정리
Genesis는 다양한 물리 솔버를 통합한 범용 물리 엔진이자, 데이터를 자동 생성하는 생성형 플랫폼입니다.
참고
프로젝트 페이지 : Genesis
상세 문서 페이지 : User Guide — Genesis 0.2.0 documentation